Training a Convolutional Neural Network (CNN) with a Fault Mapping Dataset for Linear Structure Detection



This tutorial (training_FaultMapping.ipynb) reproduces a practical example of using CNNs for image-to-image transformation, specifically for linear structure detection, based on [1], [2], and [3]. The model is trained using a fault mapping dataset [1] and implements the U-Net architecture.
1. Data
The fault mapping dataset used in this example is that published in the article “Automatic Fault Mapping in Remote Optical Images and Topographic Data with Deep Learning” by L. Mattéo et al. [1], where they adapt a U-Net Convolutional Neural Network to automate fracture and fault mapping in optical images and topographic data. The dataset contains the images, topographic data, and ground truth labels.
1.1. Dataset folders
First, we load the data, which must be organized into separate folders for images and ground truth, as well as train, validation, and test splits.
xfolder = data_dir + '/training/fault_mapping/images/'
yfolder = data_dir + '/training/fault_mapping/ground_truth/'1.2. Image preprocessing
We define the transformations to apply to the images and ground truth labels to standardize the CNN training process.
def image_transformation(noise=True):
image_transform = transforms.Compose([
transforms.Resize((256, 256)),
transforms.ToTensor(),
GaussianNoise(mean=0.0, sigma=10.0/255.0) if noise else transforms.Lambda(lambda x: x),
transforms.Normalize(mean=[0.5], std=[0.25])
])
return image_transform
def label_transformation(noise=True):
label_transform = transforms.Compose([
transforms.Resize((256, 256)),
transforms.ToTensor(),
GaussianNoise(mean=0.0, sigma=10.0/255.0) if noise else transforms.Lambda(lambda x: x),
])
return label_transform
image_transform = faultMapping.image_transformation
label_transform = faultMapping.label_transformation1.3. Datasets
We define the dataset class, which specifies how the data is loaded and handles data augmentation. We apply rotations at specific angles to artificially increase the training dataset size and improve the model’s rotational invariance.
class faultMappingDataset(Dataset):
def __init__(self, image_dir, label_dir, image_transform=None, label_transform=None, rotations=None, every_n=1, input_channels=3):
self.image_dir = image_dir
self.label_dir = label_dir
self.image_transform = image_transform
self.label_transform = label_transform
self.input_channels = input_channels
self.image_files = sorted([f for f in os.listdir(image_dir) if f.endswith('.tif')])
self.label_files = sorted([f for f in os.listdir(label_dir) if f.endswith('.tif')])
self.rotations = rotations if rotations is not None else [0]
base_indices = list(range(0, len(self.image_files), every_n))
self.index = [(i, angle) for i in base_indices for angle in self.rotations]
def __len__(self):
return len(self.index)
def __getitem__(self, idx):
img_idx, angle = self.index[idx]
# Load image
img_path = os.path.join(self.image_dir, self.image_files[img_idx])
image = imread(img_path)
if self.input_channels == 1:
image = Image.fromarray(image[..., :3].astype(np.uint8)).convert("L")
else:
image = Image.fromarray(image[..., :3].astype(np.uint8)).convert("RGB")
# Load label
label_path = os.path.join(self.label_dir, self.label_files[img_idx])
label = imread(label_path)
label = Image.fromarray((label * 255).astype(np.uint8))
# Rotation (for data augmentation)
if angle != 0:
if self.input_channels == 1:
image = TF.rotate(image, angle=angle, interpolation=InterpolationMode.BILINEAR, expand=False, fill=0)
else:
image = TF.rotate(image, angle=angle, interpolation=InterpolationMode.BILINEAR, expand=False, fill=(0, 0, 0))
label = TF.rotate(label, angle=angle, interpolation=InterpolationMode.NEAREST, expand=False, fill=0)
# Transforms
if self.image_transform:
image = self.image_transform(image)
if self.label_transform:
label = self.label_transform(label)
return [image, label]
rotations = [0, 45, 90, 315]
in_ch = 1 # Set to 1 for grayscale, 3 for RGB
train_set = faultMapping.faultMappingDataset(
xfolder + 'train/',
yfolder + 'train/',
image_transform(),
label_transform(),
rotations=rotations,
every_n=2,
input_channels=in_ch
)
val_set = faultMapping.faultMappingDataset(
xfolder + 'val/',
yfolder + 'val/',
image_transform(),
label_transform(),
rotations=rotations,
every_n=2,
input_channels=in_ch
)
test_set = faultMapping.faultMappingDataset(
xfolder + 'test/',
yfolder + 'test/',
image_transform(noise=False),
label_transform(noise=False),
rotations=[0],
every_n=1,
input_channels=in_ch
)1.4. Dataloaders
Finally, we define the dataloaders, which efficiently batch the data and feed it to the model during training.
batch_size = 4
dataloaders = {
'train': DataLoader(train_set, batch_size=batch_size, shuffle=True, num_workers=0),
'val': DataLoader(val_set, batch_size=batch_size, shuffle=True, num_workers=0)
}image_datasets = {'train': train_set, 'val': val_set}
dataset_sizes = {x: len(image_datasets[x]) for x in image_datasets.keys()}
dataset_sizes{'train': 4348, 'val': 648}
1.5. Plot the data
inputs, labels = next(iter(dataloaders['train']))
print(inputs.shape, labels.shape)torch.Size([4, 1, 256, 256]) torch.Size([4, 1, 256, 256])
this_image = 0
plot_images.plot_input_gt(inputs[this_image], labels[this_image])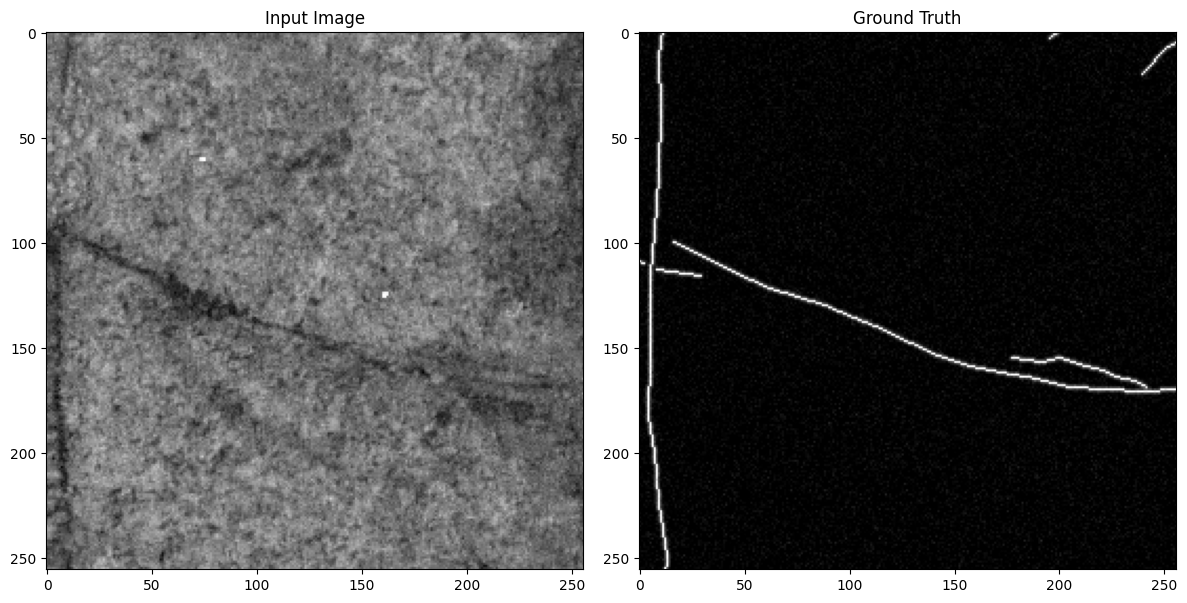
2. Model
Now, we create our neural network, which is a CNN with U-Net architecture.
2.1. Define the model
num_class = 1
in_ch = 1
model = Org_UNet.UNet(n_classes=num_class, input_channels=in_ch).to(device)
model.apply(Org_UNet.initialize_weights);2.2. Train the model
Then, we train our model with the dataset. We have two phases, each epoch has a training and validation phase.
def train_model(model, optimizer, scheduler, dataloaders, num_epochs=25, device='cpu'):
best_model_wts = copy.deepcopy(model.state_dict())
best_loss = 1e10
train_losses = []
val_losses = []
for epoch in range(num_epochs):
print('\nEpoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
since = time.time()
# Each epoch has a training and validation phase
for phase in ['train', 'val']:
if phase == 'train':
for param_group in optimizer.param_groups:
print("LR", param_group['lr'])
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
metrics = defaultdict(float)
epoch_samples = 0
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
labels = labels.to(device)
optimizer.zero_grad()
with torch.set_grad_enabled(phase == 'train'):
outputs = model(inputs)
loss = calc_loss(outputs, labels, metrics)
# backward + optimize only if in training phase
if phase == 'train':
loss.backward()
optimizer.step()
epoch_samples += inputs.size(0)
print_metrics(metrics, epoch_samples, phase)
epoch_loss = metrics['loss'] / epoch_samples
if phase == 'val':
val_losses.append(epoch_loss)
else:
train_losses.append(epoch_loss)
scheduler.step()
# deep copy the model
if phase == 'val' and epoch_loss < best_loss:
print("saving best model")
best_loss = epoch_loss
best_model_wts = copy.deepcopy(model.state_dict())
time_elapsed = time.time() - since
print('{:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('Best val loss: {:4f}'.format(best_loss))
# load best model weights
model.load_state_dict(best_model_wts)
return model, train_losses, val_losses, best_loss
optimizer_ft = optim.Adam(model.parameters(), lr=1e-4, weight_decay=1e-5)
exp_lr_scheduler = lr_scheduler.StepLR(optimizer_ft, step_size=10, gamma=0.1)
model, train_losses, val_losses, best_loss = train.train_model(model, optimizer_ft, exp_lr_scheduler, dataloaders, num_epochs=1, device=device)plot_metrics.plot_losses(train_losses, val_losses)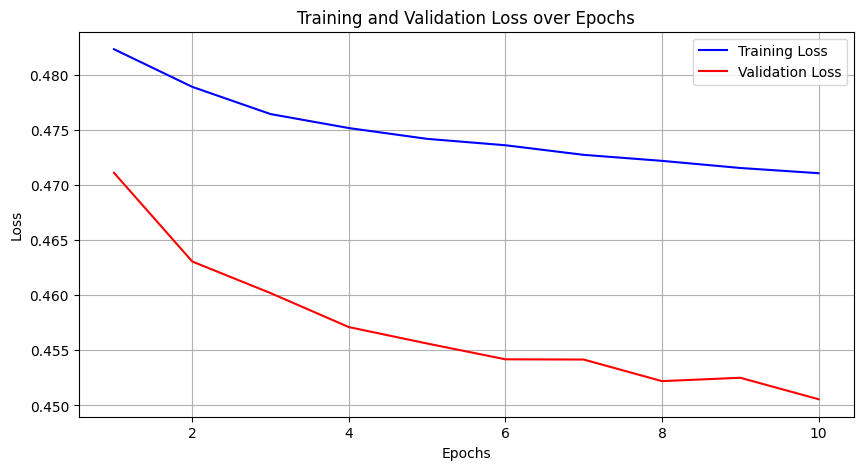
3. Prediction
Now, we assess the performance of the network. First, we use the test dataset, which was unseen by the CNN during training.
model.eval();3.1. Labeled datasets
test_loader = DataLoader(test_set, batch_size=1, shuffle=True, num_workers=0)inputs, labels = next(iter(test_loader))
pred = model(inputs.to(device))
display(pred.shape)
pred_c = torch.sigmoid(pred).data.cpu().numpy().squeeze(1)
pred_c = np.where(pred_c>=0.5, 1, 0)
display(pred_c.shape);
plot_images.plot_input_gt_pred(inputs[0], labels[0], pred_c[0])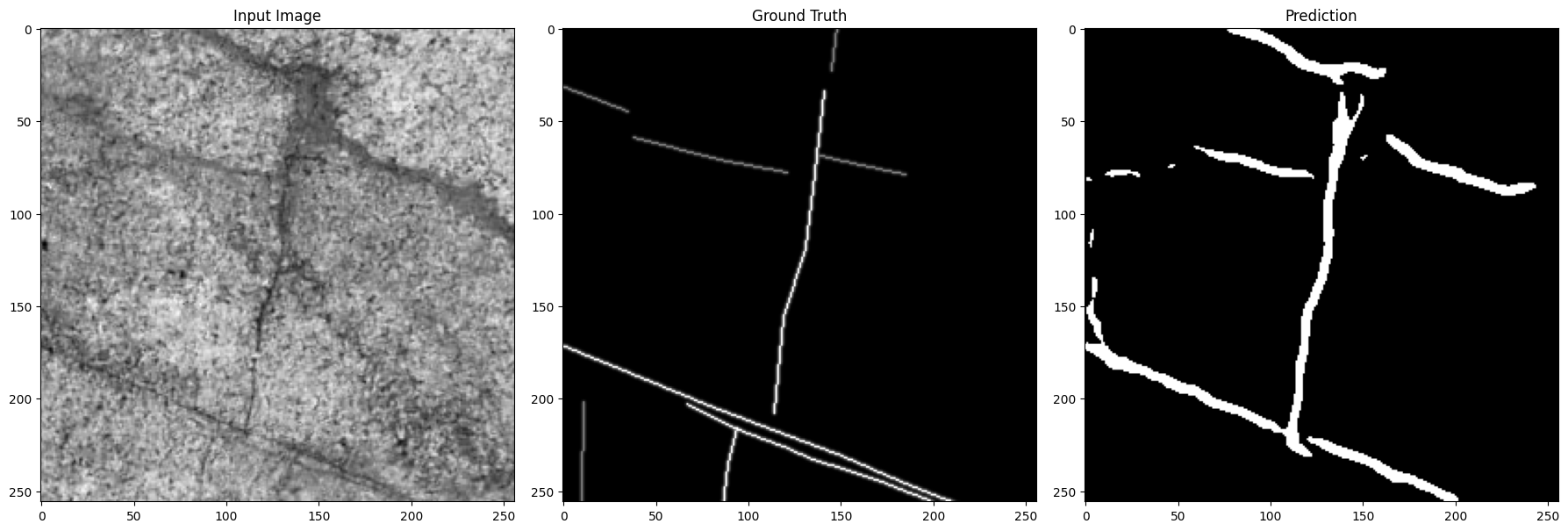
3.2. Unlabeled datasets
Finally, we test the network on unlabeled datasets to demonstrate its capability to detect linear structures in new, real-world images without ground truth labels.
image = Image.open(output_dir + '/test' + '/img_4.jpg')
image = image.convert("L")
image_transformed = image_transform(noise=False)(image).unsqueeze(0)
pred = model(image_transformed.to(device))
pred_c = torch.sigmoid(pred).data.cpu().numpy()
pred_c = np.where(pred_c>=0.5, 1, 0)
fig, (ax0, ax1) = plt.subplots(1, 2, figsize=(15, 10))
ax0.imshow(image_transformed[0, 0], cmap='gray')
ax0.set_title('Original Image')
ax1.imshow(pred_c[0, 0], cmap='gray')
ax1.set_title('Predicted Edges')
plt.show()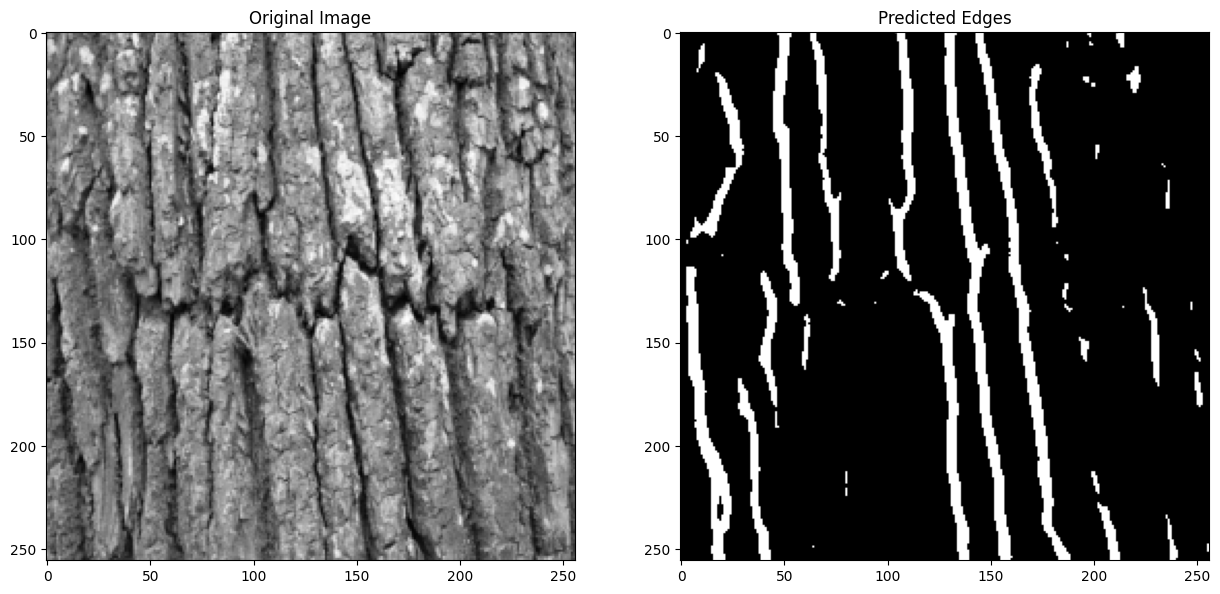
References
[1]. L. Mattéo et al., “Automatic Fault Mapping in Remote Optical Images and Topographic Data with Deep Learning,” Journal of Geophysical Research: Solid Earth, vol. 126, no. 4, p. e2020JB021269, 2021, doi: 10.1029/2020JB021269.
[2]. N. Usuyama and K. Chahal, “UNet/FCN PyTorch,” GitHub Repository, 2018. Available online: https://github.com/usuyama/pytorch-unet.
[3]. I. Ocak and O. Tepencelik, “Edge Detection Using U-Net Architecture,” GitHub Repository, 2020. Available online: https://github.com/iocak28/UNet_edge_detection.